Waymo发布新型自动驾驶模型EMMA,基于谷歌Gemini大语言模型
2024-11-01 10:57:13
作者:zyfdd
来源:互联网
近日,Waymo宣布了一项重大研究成果——名为“端到端多模态自动驾驶模型”(EMMA)的新型自动驾驶系统。该模型依托谷歌的多模态大语言模型(MLLM)Gemini,旨在提升无人驾驶车辆在复杂环境中的导航和适应能力。
据Waymo介绍,传统的自动驾驶系统往往采用模块化的设计,每个模块负责特定的功能,如感知、映射、预测和规划等。然而,这种设计在扩展性和新环境适应性方面存在局限性。为了突破这些限制,Waymo引入了Gemini大语言模型,利用其丰富的世界知识和卓越的推理能力,打造了一个更加智能和灵活的自动驾驶系统。
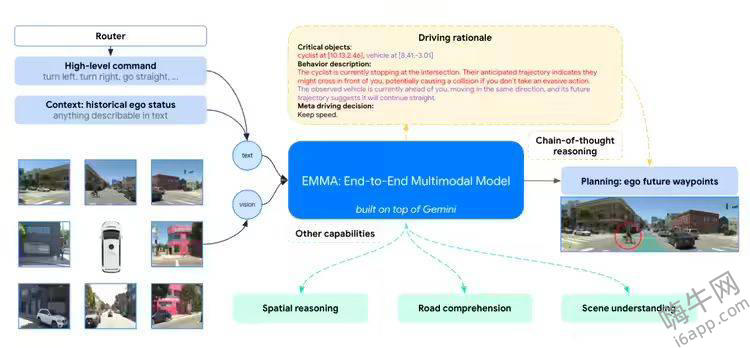
尽管EMMA模型在理论上具有显著优势,但在实际应用中仍面临一些挑战。目前,由于计算开销过高,该模型无法整合来自激光雷达或雷达的3D传感器输入,只能处理有限数量的图像帧。此外,研究团队还指出,Gemini等MLLM模型可能会产生“幻觉”,这在无人驾驶汽车中是不容忽视的安全隐患。因此,在EMMA模型能够大规模部署之前,还需要进行更多的研究和测试。
以上就是Waymo发布新型自动驾驶模型EMMA,基于谷歌Gemini大语言模型的全部内容了,嗨牛网精心打造,旨在为您呈现一个满载精彩纷呈资讯的宝库,全球前沿资讯、深度剖析行业动态、汇聚热门话题与独特视角,力求为您带来一场场知识与娱乐并重的盛宴。
免责声明:文中图片应用来自网络,如有侵权请联系删除
相关文章更多>>
热门资讯
更多>>- 1宝可梦卡牌P掀起数字卡牌收集新风潮,NFC能否借此东山再起?
- 2任天堂“突袭”!龙神模拟器易主引轩然大波
- 3龙腾世纪4口碑崩塌:谷歌用户大量打出1分
- 4星鸣特攻闪电陨落:2亿美金巨资打造,两周寿命引业界唏嘘
- 5NVIDIA携手xAI打造全球顶尖AI超级计算机Colossus
- 6Apple Watch Series 10:十周年献礼,重塑智能手表新纪元
- 7“双11”购物节再破纪录,白酒价格战激烈,飞天茅台价近2000元
- 8苹果智能家居显示屏即将面世,复古设计搭配现代功能
游戏榜单
更多>>-
1

聚会卧底游戏
9.5M
点击查看 -
2

趣味猫语翻译器
120.0M
点击查看 -
3

国珍优选最新版
16.34M
点击查看 -
4

鲸鱼盲盒
31.5M
点击查看 -
5

钢琴弹奏大师
46.4M
点击查看 -
6

涂色小画家
16.2M
点击查看